How Much Feedback Is Enough for MIMO? II Channel Estimation
[How Much Feedback Is Enough for MIMO? I Introduction]
[How Much Feedback Is Enough for MIMO? III Codebook Design]
[How Much Feedback Is Enough for MIMO? IV Channel Quantization]
[How Much Feedback Is Enough for MIMO? V Feedback Reliabilities]
[How Much Feedback Is Enough for MIMO? VI Rank Deficiency]
In general, the channel quantization distortion is decided by channel quality, channel estimation and codebook design. Given σh2, the channel estimation mean squared error (MSE), the minimum rate at the channel quantization mean squared distortion Dh is given by
R( Dh ) ≥ M log2[ σh2 / ( Dh/M + σh2 ) ]
Meanwhile, the lower bound to the unbiased MSE σh2 is given by Cramer-Rao lower bound (CRLB), which is defined as the inverse of the Fisher Information Matrix (FIM).
[How Much Feedback Is Enough for MIMO? III Codebook Design]
[How Much Feedback Is Enough for MIMO? IV Channel Quantization]
[How Much Feedback Is Enough for MIMO? V Feedback Reliabilities]
[How Much Feedback Is Enough for MIMO? VI Rank Deficiency]
MIMO beamforming with finite-rate feedback is modelled as a noisy Gaussian binary erasure feedback channel depicted. In reality, the receivers estimate channels with the pilots sent by transmitter. Accuracy of the channel estimation depends on both forwardlink design and receiver design. The pilot transmission is important for receiver to efficiently estimate CSI. antenna. An overview of pilot-assisted transmission (PAT) including pilot placement and channel estimation can be found in [Tong 04]. There are two popular pilot patterns, time multiplexed pilots (TMP) and superimposed pilots (SIP), receiving much attention for MIMO CSI estimation. They are shown in Fig. 1. Optimal pilot placement was investigated in [Dong 02]. TMP is a typical example of orthogonal pilot design where pilot symbols and data symbols are separated in time and/or frequency domain, which makes them orthogonal to each other. With orthogonal pilots, the CSI estimation and data demodulation can be done separately which may lead to simple receiver design [Dong 02]. SIP does the opposite. In SIP design, pilots and data nonorthogonally share the same time period and frequency band. In this case, joint channel estimation/demodulation and the demodulation with pilot interference cancellation are among the most popular receiver design techniques [Coldrey 06]. After channel estimation, the receiver chooses a beamforming vector from a shared MIMO precoding codebook. This is called channel quantization. It means the receiver actually feeds back the chosen precoding index(es) to transmitter(s) instead of channel response for MIMO precoding.
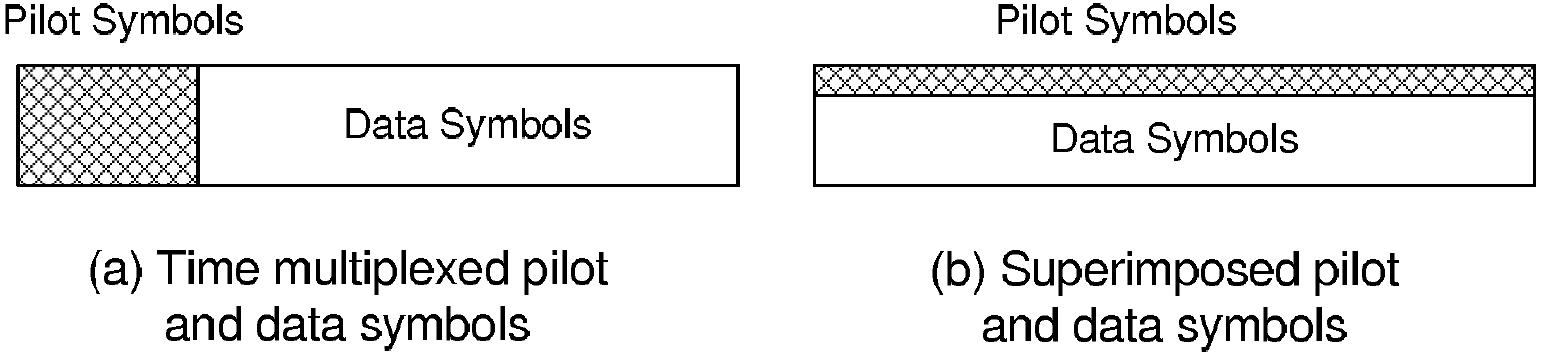 |
| Figure 1. Pilot patterns for channel estimation |
In general, the channel quantization distortion is decided by channel quality, channel estimation and codebook design. Given σh2, the channel estimation mean squared error (MSE), the minimum rate at the channel quantization mean squared distortion Dh is given by
R( Dh ) ≥ M log2[ σh2 / ( Dh/M + σh2 ) ]
Meanwhile, the lower bound to the unbiased MSE σh2 is given by Cramer-Rao lower bound (CRLB), which is defined as the inverse of the Fisher Information Matrix (FIM).


Comments